
Multi-Link ™
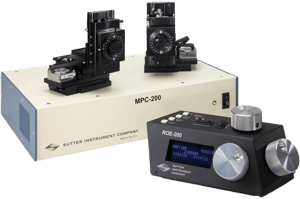
Multi-Link Position Control is a stand-alone software package that interfaces with our MPC-200 manipulator controllers. Multi-Link is an intuitive GUI that uses the MPC-200 driver Sutter developed for the NIH freeware, μManager. It operates any Sutter Instrument device that can be connected to the MPC-200, including: manipulators, motorized microscopes (MOM and SOM), the MT-800 translator (with or without focus drive), and the MPC-78 platform stage (with or without focus drive) and the 3DMS stage.
The most powerful aspect of the Multi-Link software is the ability to link the movement of multiple devices together. The lead pipette can be used to direct the movement of a microscope translator (objective/camera), or the translator can function as the leader and thereby keep the pipettes in the field of view. The leading device can be controlled through the manual input knobs of the ROE-200 or the computer GUI via a mouse or other PC interface.
Multi-Link easily memorizes multiple working locations and can rapidly switch between them. The user simply moves the microscope to a region of interest and clicks to save the location. Turning on “Link” will then coordinate all linked devices (usually manipulators) with moves made by the microscope via a motorized translator. Switching between memorized positions will bring all linked devices to that location. Link, intuitive and easy to use, will allow users to bring all their pipettes to a working location in seconds! The memory positions available in the Multi-Link software allow for most of the same robotic functionality found in our MP-285. Memorized locations can be repeated in looped operation.
While all features found in the ROE-200 have been replicated in Multi-Link, full functionality of the ROE is retained, allowing movement of any connected device by turning the knobs on the ROE or by clicking and dragging the pipettes in software. Moves made in the GUI update the positional information displayed on the ROE, and moves made with the ROE-200 are updated in Multi-Link.
ADDITIONAL FEATURES
Accurately linked moves require “Calibration”. A calibration protocol within the software automatically determines the mounting angle of each manipulator in the X-Y plane, so that Linked movement of the pipette will always be accurate. With two simple moves, the software automatically determines the mounting angle of each pipette with respect to the objective/camera.
The ROE-200 always displays the coordinates in an absolute scale, from 0 to 25000 μm. Multi-Link displays coordinates in either absolute or relative scale. Press one button to set the relative origin in all three axes and move in a positive or negative direction with respect to the Relative origin. Multi-Link can also multiply the coordinates by a user-defined Scaling factor. The Scaling factor allows the user to match the position information displayed in Multi-Link to that of third-party and/or home-made stages, translators, focusing knobs, or other stepper motor devices.
One of the most innovative features of Multi-Link is the GUI representation of all manipulated pipettes. In addition to being a great teaching tool, the GUI allows a user to visualize the relative position of all pipettes in an experiment. Zoom out to see the location of each pipette at each memorized Location, even when these positions are outside the microscope’s field of view. Drag the virtual pipettes from one memorized position to another and the manipulators will move the real pipettes in real-time.
All the features of the Multi-Link software, from Link to the virtual pipette GUI, will increase the success rate of your experiments and save time. But the best feature of this software is the price. Sutter is including this software at no charge with all MPC-200 systems. The software is also available as a FREE download for those with existing MPC-200 systems!

- Features
- System Requirements
- Download
- Product Information
- Videos
- Selectable linking of one, two or more manipulators and translator
- Unlimited memorized positions
- Simultaneous control via ROE and computer GUI
- Positional information mirrored between GUI and ROE
- Pipettes are color coordinated to selectedmanipulator LED on ROE
- Supports mounting of manipulators at ANY mounting angle in the X-Y plane
- Extended version controls up to 8 manipulators
- Backwards compatible with all existing MPC-200 controllers
- Price: FREE!
Available in 32-bit and 64-bit versions
Multi-Link™ has the following prerequisites:
- Microsoft Windows PC with Windows XP or newer
- SI CDM Unified USB Driver
- MatLab Compiler Runtime (64-bit or 32-bit depending on your OS)
- Microsoft Visual C++ Redistributable Package (64-bit or 32-bit depending on your OS)
Multi-Link has the following prerequisites:
- SI CDM Unified USB Driver
- MatLab Compiler Runtime (64-bit or 32-bit depending on your OS)
- Microsoft Visual C++ Redistributable Package (64-bit or 32-bit depending on your OS)
If a required package is already installed on your system, there is no need to reinstall that package
Installation Instructions
Step 1 - Download and install SI CDM Unified USB Driver > Download
SI CDM Driver Installation Guide for Windows 7 > Download
Step 2 - Download and install the appropriate MatLab Compiler Runtime:
64-bit Matlab Compiler Runtime > Download
32-bit Matlab Compiler Runtime > Download
Step 3 - Download and install the appropriate Microsoft Visual C++ Redistributable Package:
Step 4 - Download and install the appropriate version of Multi-Link:
USER MANUAL
dPatch & SutterPatch Quick Start Guide
dPatch & SutterPatch Operation Manual
PRODUCT INFORMATION
Comparison with Brand aX
Dynamic Clamp Flyer
dPatch Sales Flyer (English version)
SutterPatch® Sales Flyer
Comparison of Sutter Amplifier Systems
VIDEOS:
WEBINAR: Dynamic Clamp and Cross-Experiment Analysis
SutterPatch Informational Video
SutterPatch Walk-Through: #1 Introduction
SutterPatch Walk-Through: #2 Amplifier Control
SutterPatch Walk-Through: #3 Routines
SutterPatch Walk-Through: #4 Data Navigator and Metadata
SutterPatch Walk-Through: #5 Application Modules
SCIENTIFIC PUBLICATIONS
Experiments of interest involving Sutter Instrument amplifier systems and SutterPatch® software
Book Chapter: Patch Clamp Technology in the Twenty-First Century
In: Dallas M., Bell D. (eds) Patch Clamp Electrophysiology. Methods in Molecular Biology, vol 2188. Humana, New York, NY
VIDEOS:
WEBINAR: Dynamic Clamp and Cross-Experiment Analysis
SutterPatch Informational Video
SutterPatch Walk-Through: #1 Introduction
SutterPatch Walk-Through: #2 Amplifier Control
SutterPatch Walk-Through: #3 Routines
SutterPatch Walk-Through: #4 Data Navigator and Metadata
SutterPatch Walk-Through: #5 Application Modules
SCIENTIFIC PUBLICATIONS
Experiments of interest involving Sutter Instrument amplifier systems and SutterPatch® software
Book Chapter: Patch Clamp Technology in the Twenty-First Century
In: Dallas M., Bell D. (eds) Patch Clamp Electrophysiology. Methods in Molecular Biology, vol 2188. Humana, New York, NY
Videos
SutterPatch Walk-Through: #1 Introduction
SutterPatch Walk-Through: #2 Amplifier Control
SutterPatch Walk-Through: #3 Routines
SutterPatch Walk-Through: #4 Data Navigator and Metadata
SutterPatch Walk-Through: #5 Application Modules
WEBINAR: Dynamic Clamp and Cross-Experiment Analysis
WEBINAR: Dynamic Clamp and Cross-Experiment Analysis (Youku)
WEBINAR: Puller Maintenance & Imaging with Patch Clamp
WEBINAR: Puller Maintenance & Imaging with Patch Clamp (Youku)
Applications
- Cellular microscopy
- Microinjection automation
- Semiconductor Manufacturing
- Laser Microfabrication
Related Products
Enhance capabilities and take your lab to the next level with more products from Sutter Instrument.

Need help finding the right product?
Whether you're looking for a quote, or unsure of which Sutter product best fits your application, our knowledgeable experts can help answer your questions, and customize systems to fit your needs.